
商务合作 电话:17719878617
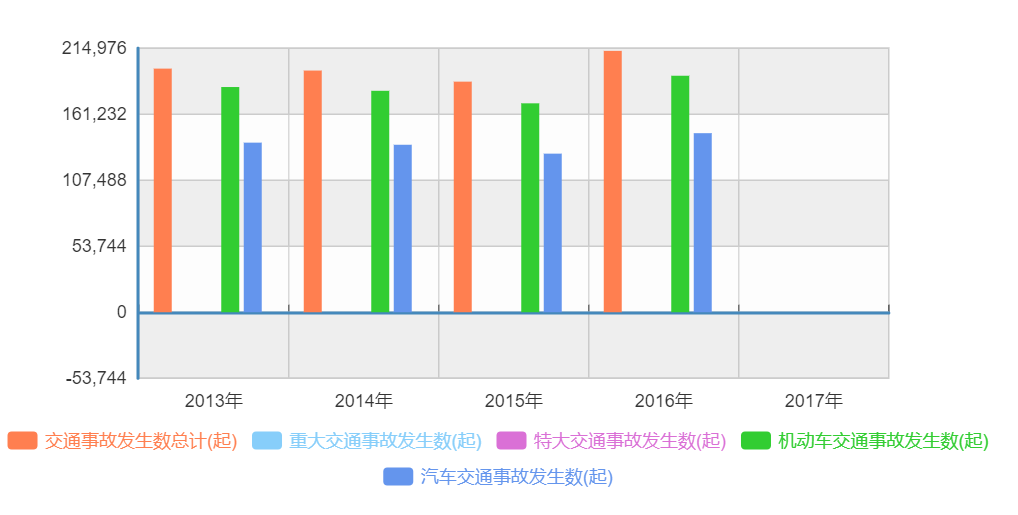
之前“重庆公交车坠河”事件引起了全国人民的关注,使得交通安全问题再度成为公众关注的热点话题。小喵也针对交通事故做了调查,结果真是触目惊心。2016年全国交通事故发生总数达到212846起,造成226430人受伤,63093万人死亡,竟然同冰岛的全国人口数相当。在这些冰冷的数据背后,是一条条鲜活的生命,有效保障人民的交通安全,成为所有人的共同愿景。
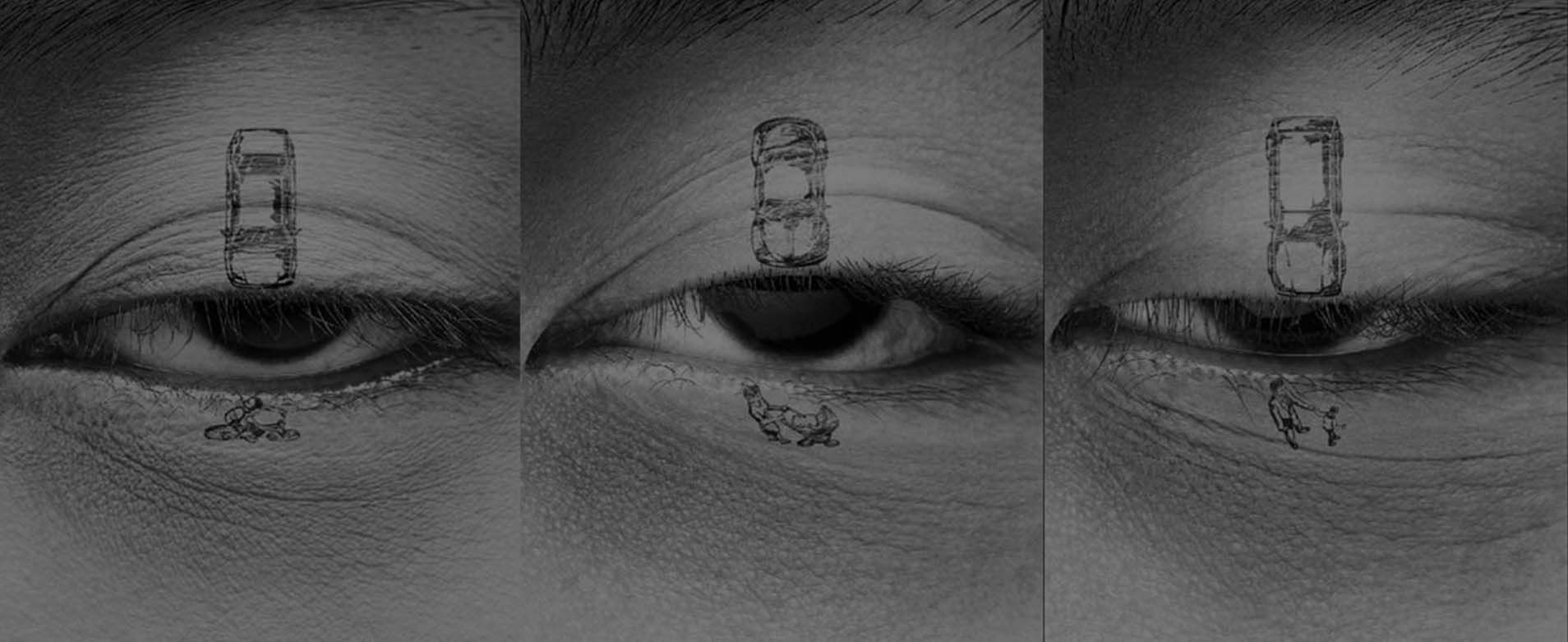
在这些交通事故中,有很大一部分为疲劳驾驶、开车“低头族”造成的。疲劳驾驶状态下,驾驶员闭眼的1秒,事故率陡然升高;“低头族”看一眼微信的2秒内,可能就终结了一个人的生命。国家也出台了相关法规整治酒后驾车与开车“低头族”的问题,但是由此引发的事故仍旧屡见不鲜,提出更加高效的解决办法就显得更加迫切了。
科技的进步推动着社会的发展,前些年开始流行的“互联网+”为人们的生活提供了极大的便利,而近年开始成为热点的人工智能又开始同产业结合,改变人们的生活。就安全驾驶的问题而言,驾驶检测系统在AI的大背景下应运而生,改变着每个驾驶员的生命之路。

安全驾驶检测系统,是基于对各类交通图片数据的识别,通过深度学习,实现智能的对安全驾驶进行提醒与警告。其功能包括行人碰撞预警、前车碰撞预警、车道偏离预警、疲劳驾驶检测、盲区检测预警、夜视辅助系统等诸多功能,来保证驾驶安全。
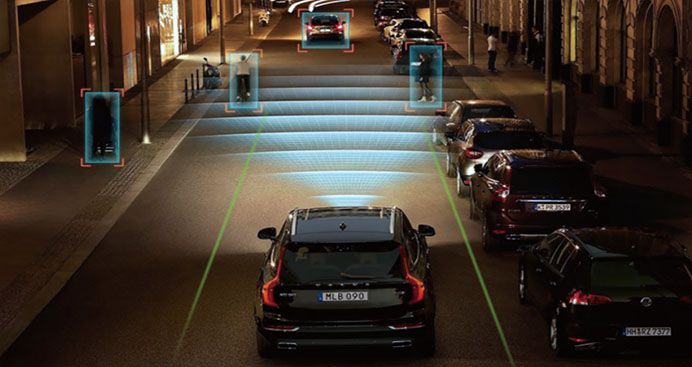
行人碰撞预警系统(Pedestrian Collision Warning),基于计算机视觉的图像算法,检测行驶车道上静态和动态的行人,提前预警,防止行人碰撞事故的发生。
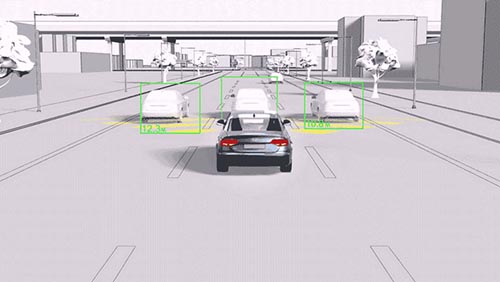
前车碰撞预警系统(Forward Collision Warning),它通过感应和计算在行驶过程中车辆与前车的距离来判断潜在的碰撞风险,并立即发出警示。

车道偏离预警(Lane Departure Warning),通过ADAS算法监测车辆在车道中的位置,当车辆压线或者即将压线时向司机发出警告,防止因车道偏离造成的交通事故发生。

疲劳驾驶监测(Driver Fatigue Monitor),通过视觉传感器对人的眼睑眼球的几何特征和动作特征、眼睛的凝视角度及其动态变化、头部位置和方向的变化等进行实时检测和测量,对疲劳驾驶行为进行预警。
盲区监测预警(Blind Spot Monitor),通过在驾驶者视觉盲区覆盖安装摄像头,帮助驾驶者看清盲区的路况信息,对盲区潜在碰撞进行预警。
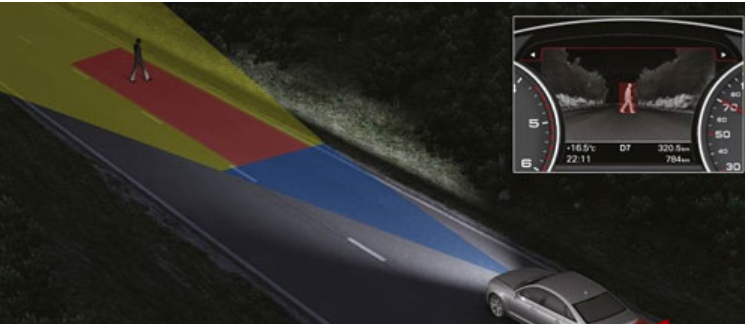
夜视辅助系统(Night Vision),是一种源自军事用途的汽车驾驶辅助系统。在这个系统的帮助下,驾驶者在夜间或弱光线的驾驶过程中将获得更高的预见能力,能够针对潜在危险向驾驶者提供更加全面准确的信息或发出早期警告。
安全驾驶的功能,实现的基础是各类海量的图片数据,诸如各类驾驶员的图片资料、车辆行驶状况图片、车道线识别图片、信号灯图片、行人图片信息都是确保系统正常运转的基础,如果在数据环节出现错误,Uber无人车的车祸便是典型案例。
点我科技正是为无人驾驶与安全驾驶系统提供高质量数据服务的专业数据服务商,丰富的数据采集经验,涵盖了无人驾驶所需的全部领域,为安全驾驶系统提供数据基础,从根基层面保障驾驶安全。同时同各个人工智能厂商的合作,积累了丰富的数据经验,获得了广泛的好评。龙猫数据正在成长为数据行业的的领跑者,服务AI产业,筑基智慧生态。

